Publications
✉️ represents corresponding author.
2023
2022

2021
-
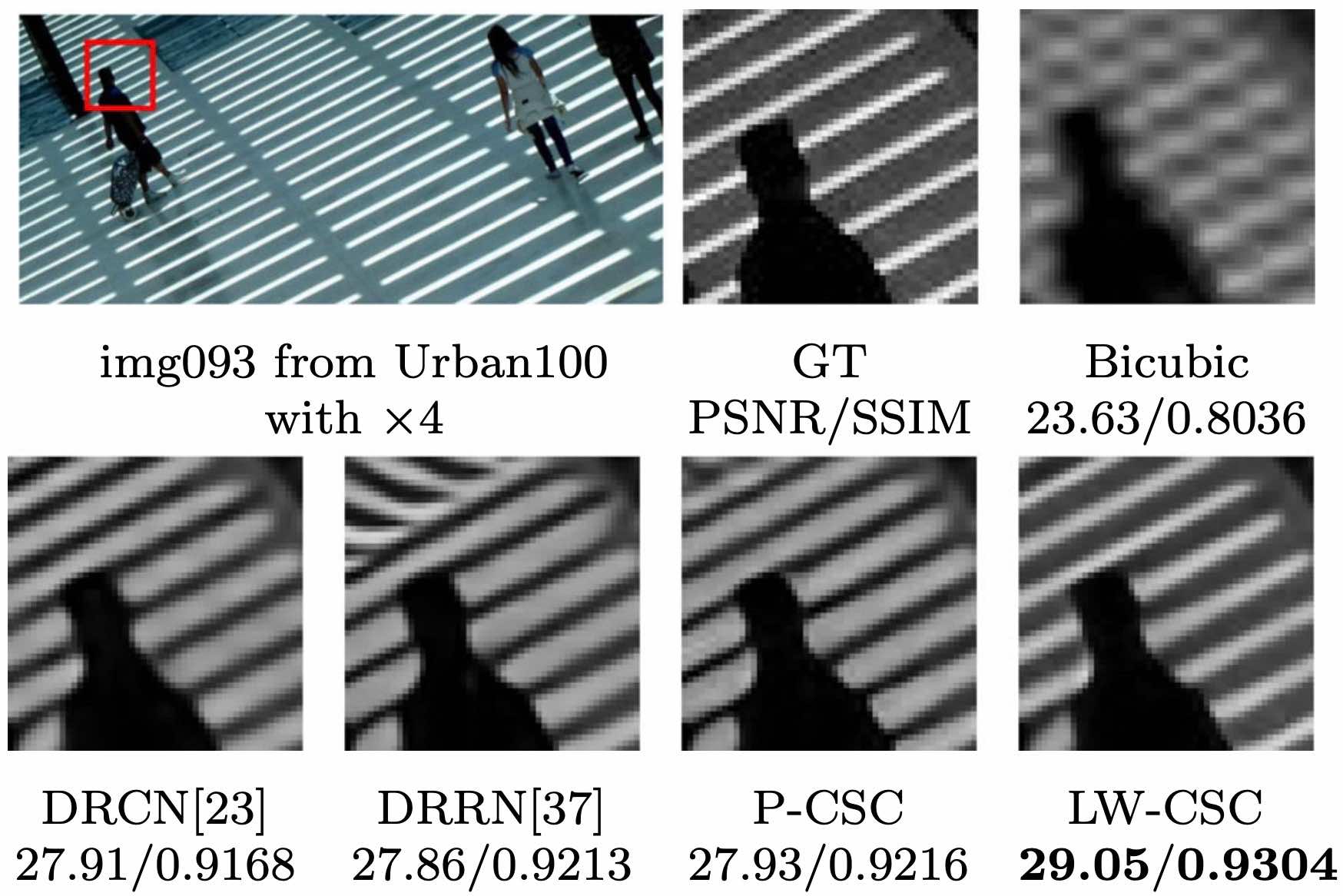 Image super-resolution by learning weighted convolutional sparse codingSignal, Image and Video Processing, 2021
Image super-resolution by learning weighted convolutional sparse codingSignal, Image and Video Processing, 2021

2020
-
-
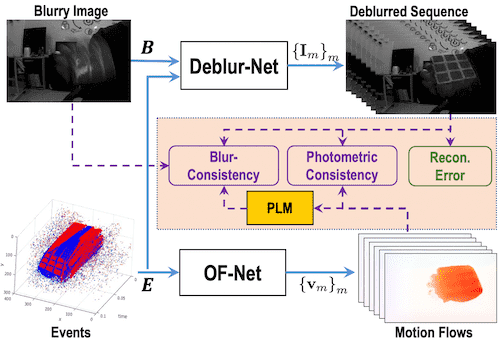
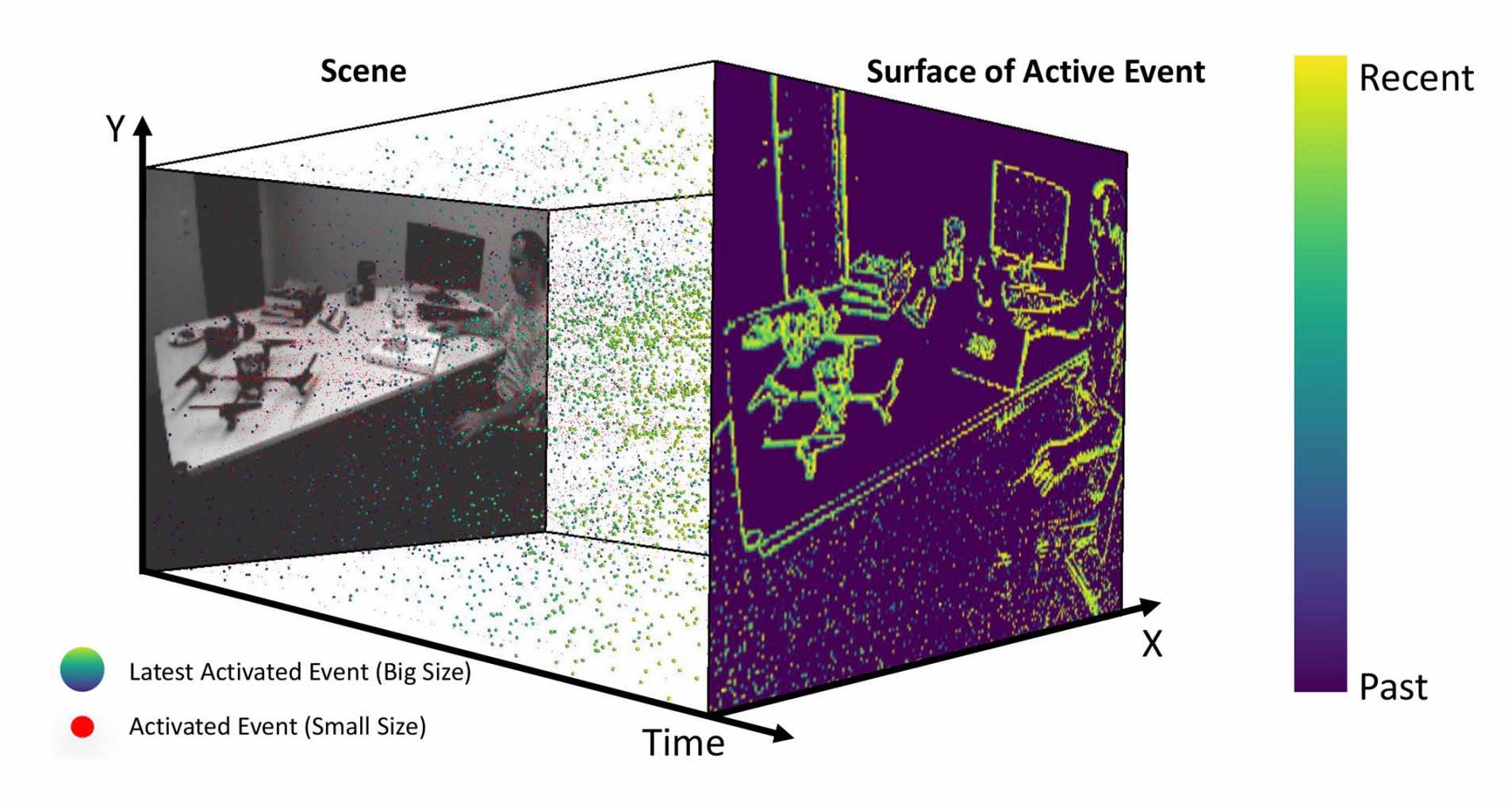
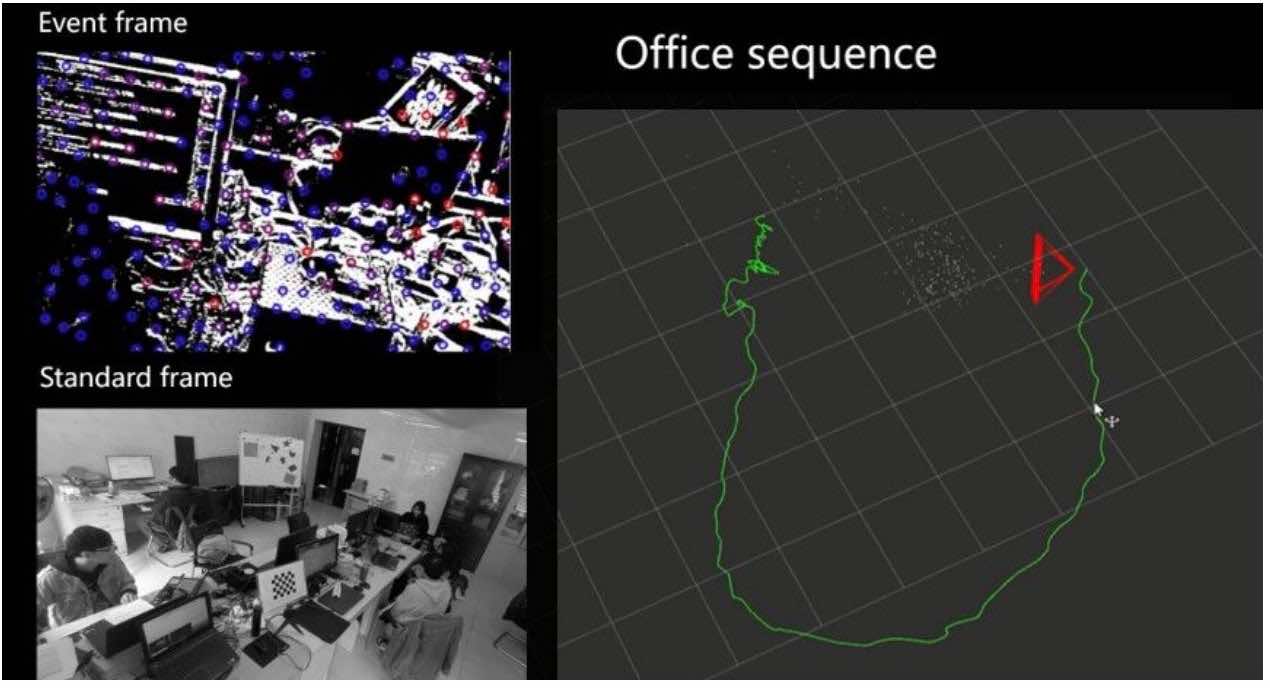
 Robust motion compensation for event cameras with smooth constraintIEEE Transactions on Computational Imaging, 2020
Robust motion compensation for event cameras with smooth constraintIEEE Transactions on Computational Imaging, 2020 -
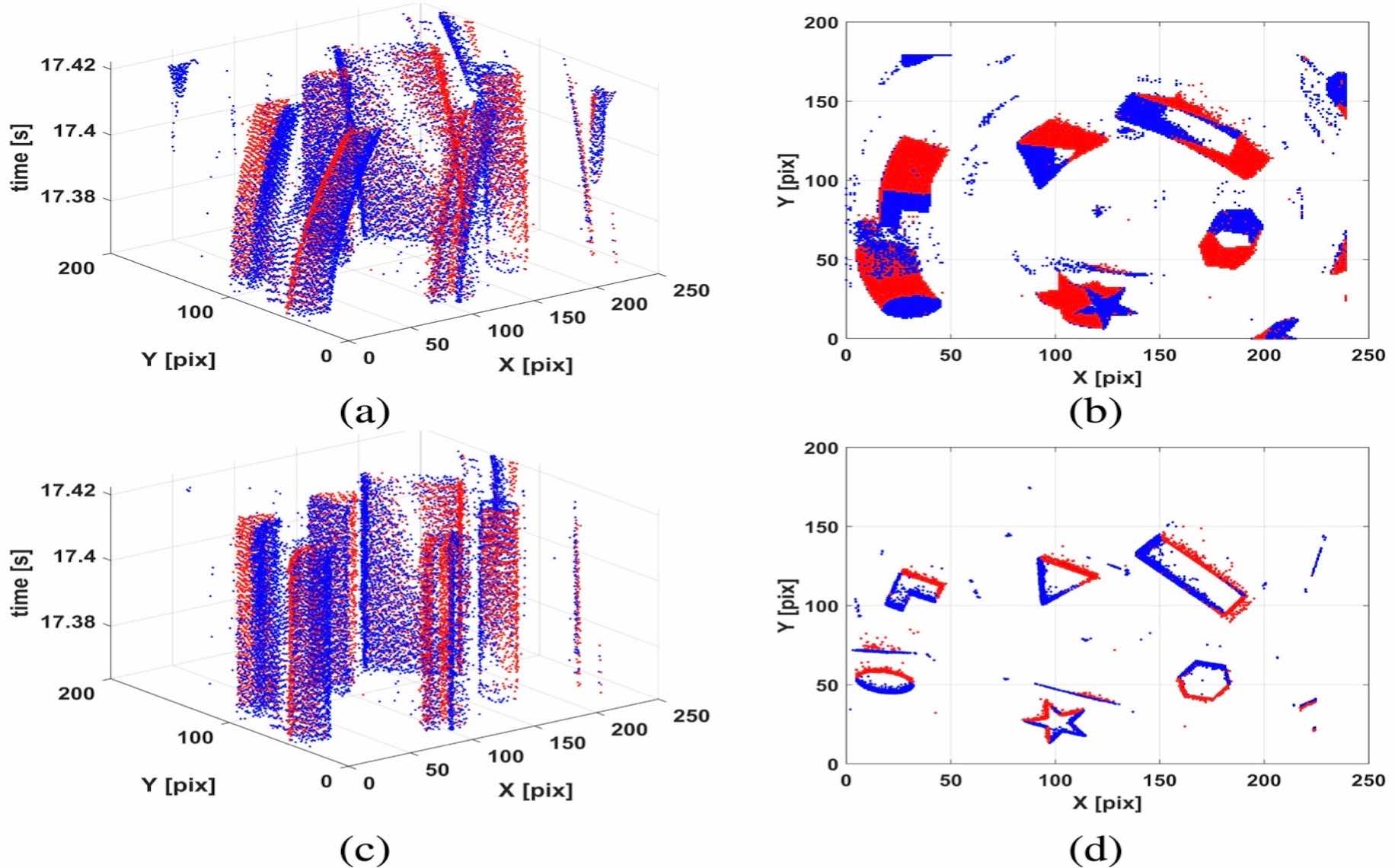
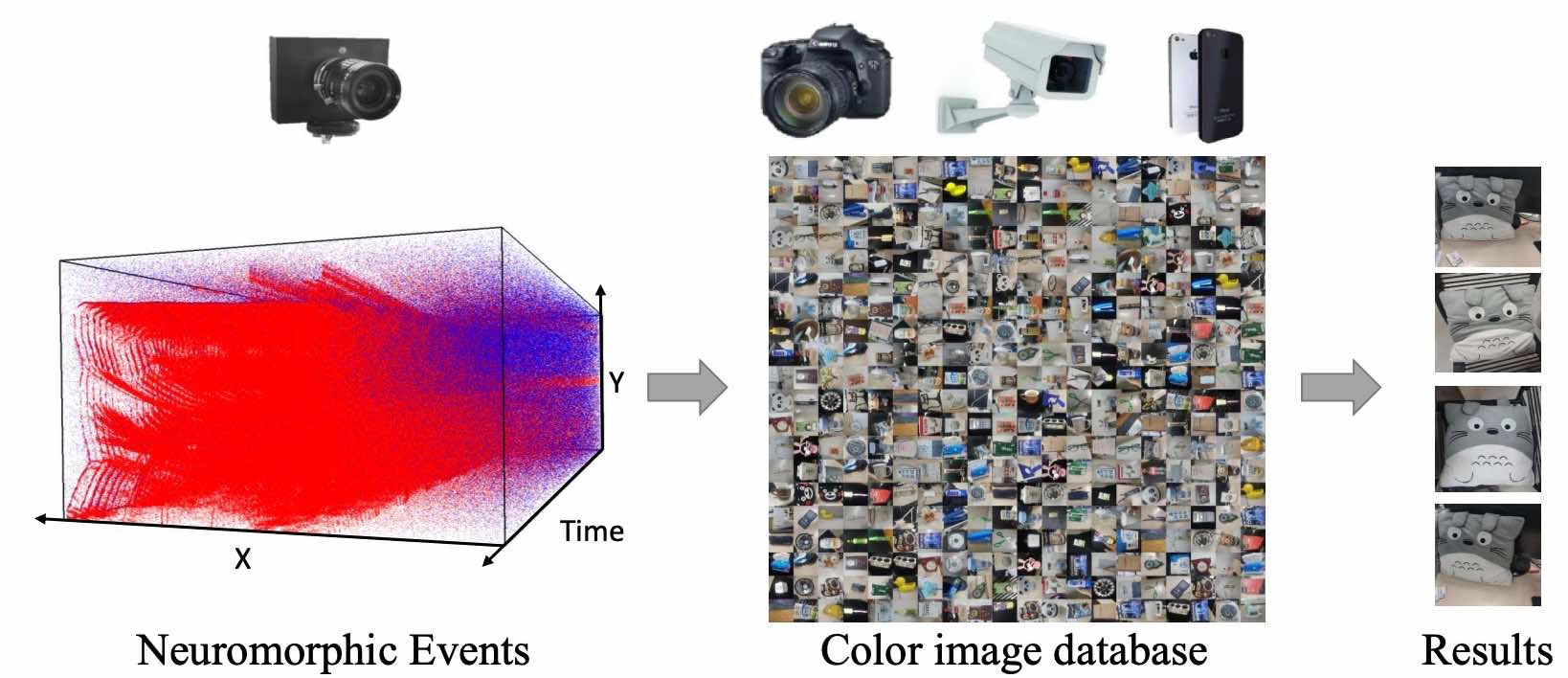 Matching Neuromorphic Events and Color Images via Adversarial LearningarXiv preprint arXiv:2003.00636, 2020
Matching Neuromorphic Events and Color Images via Adversarial LearningarXiv preprint arXiv:2003.00636, 2020 -
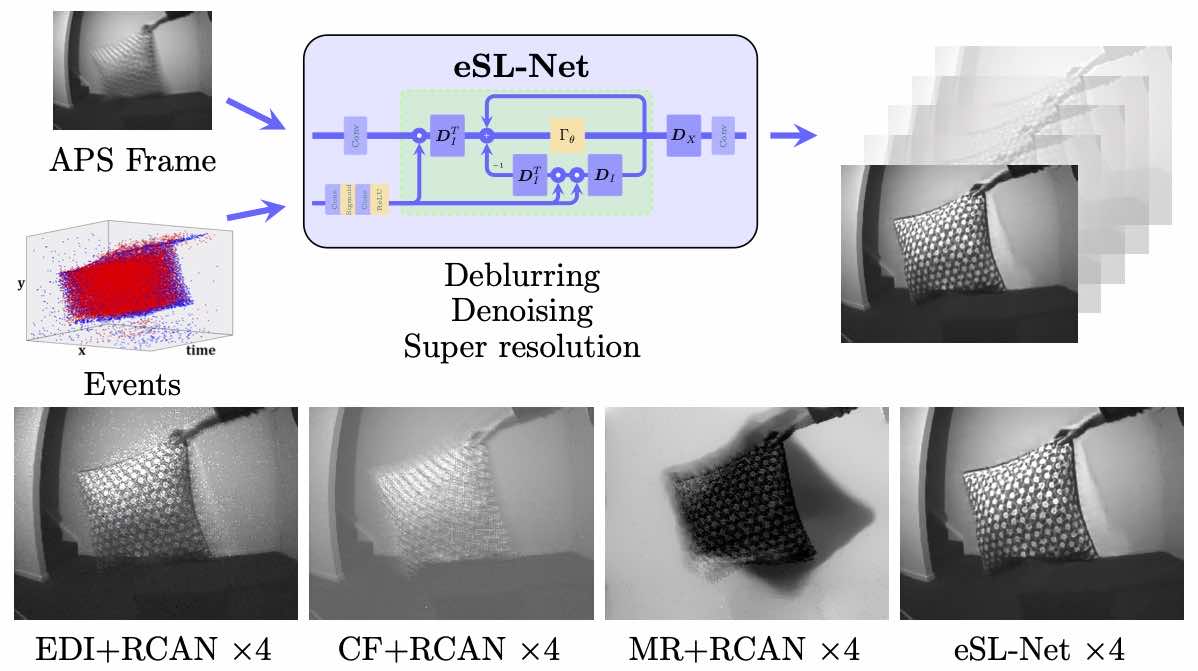
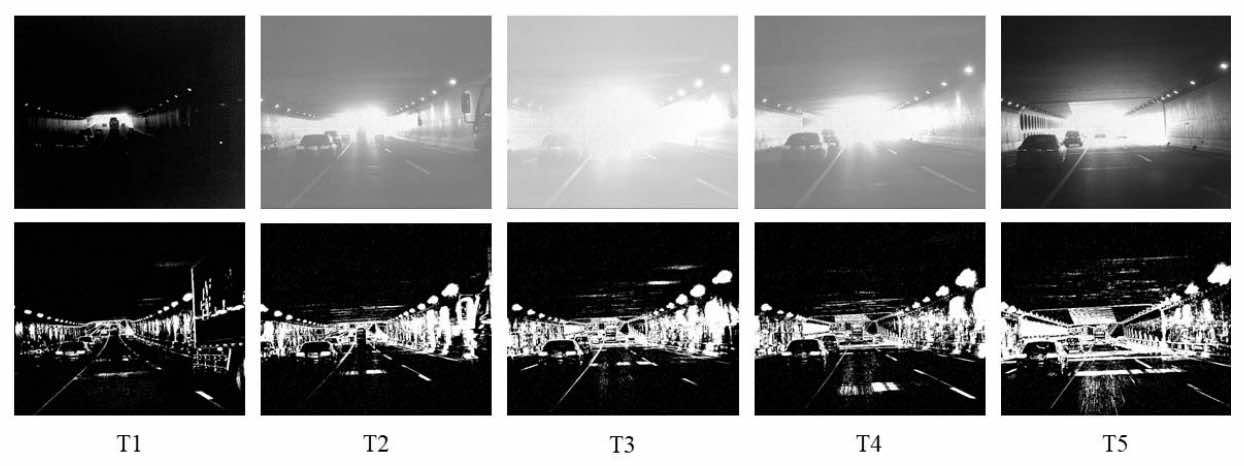
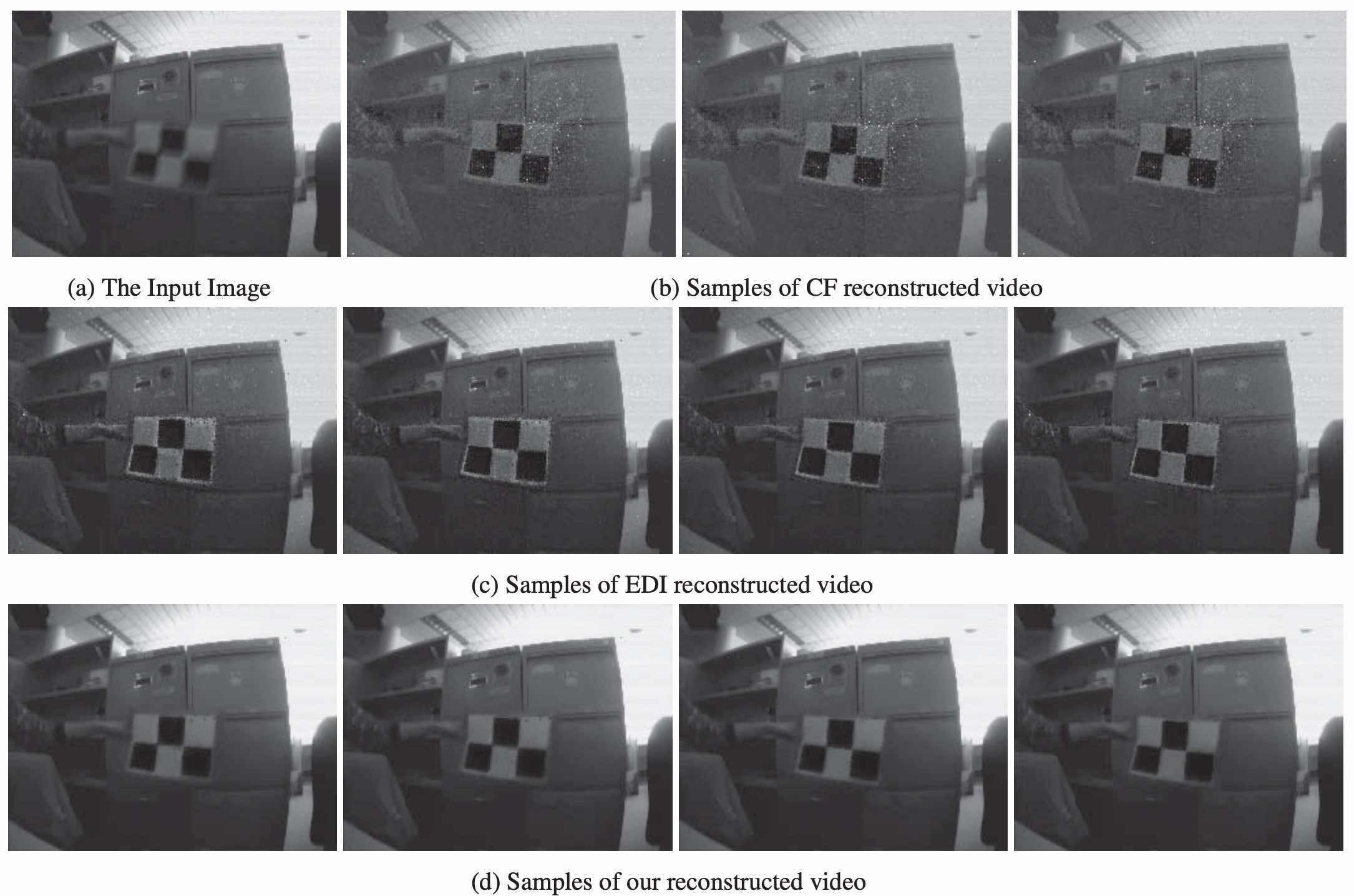 Robust Intensity Image Reconstruciton Based On Event CamerasIn 2020 IEEE International Conference on Image Processing (ICIP), 2020
Robust Intensity Image Reconstruciton Based On Event CamerasIn 2020 IEEE International Conference on Image Processing (ICIP), 2020 -
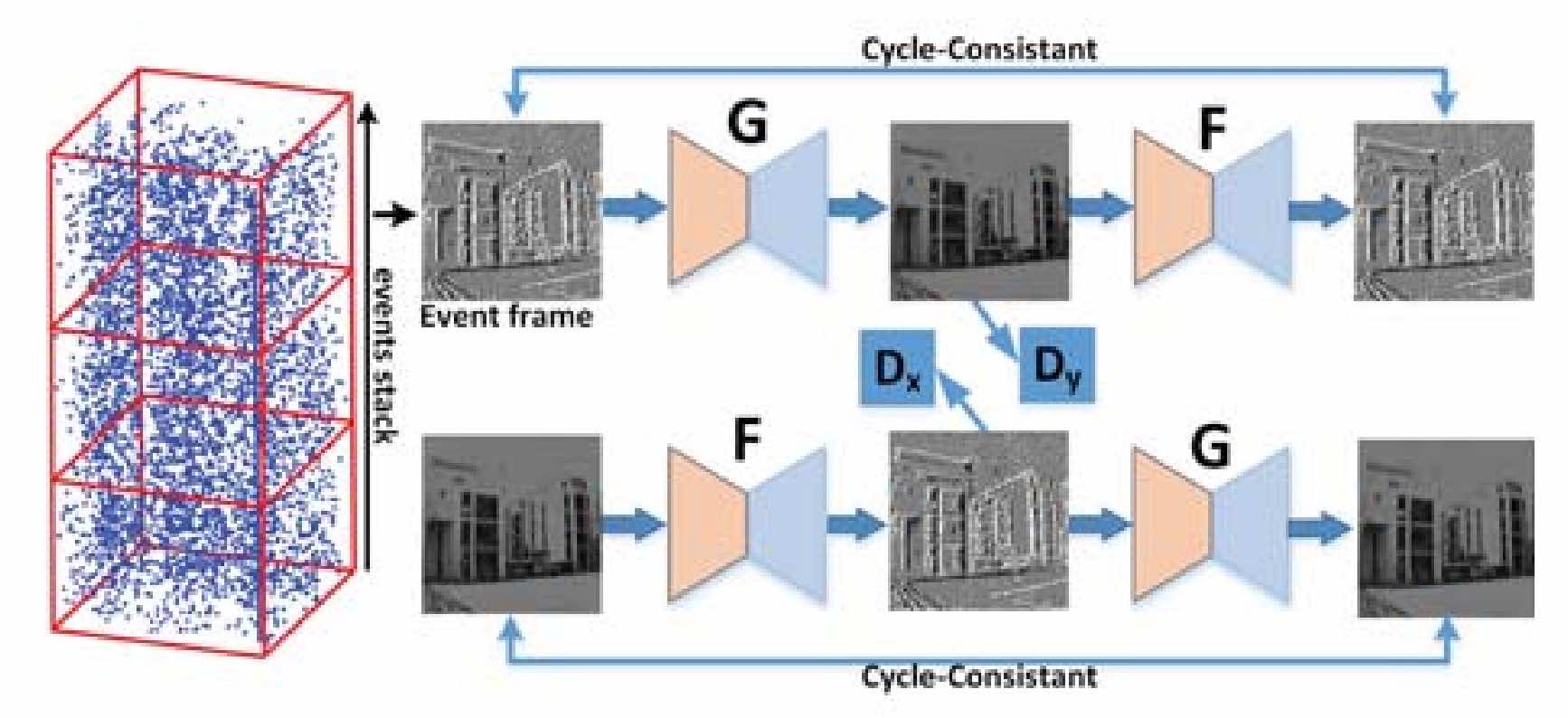 Event-based high frame-rate video reconstruction with a novel cycle-event networkIn 2020 IEEE International Conference on Image Processing (ICIP), 2020
Event-based high frame-rate video reconstruction with a novel cycle-event networkIn 2020 IEEE International Conference on Image Processing (ICIP), 2020 -
Implicit Euler ODE networks for single-image dehazingIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, 2020
-
Facial Feature Embedded CycleGAN for VIS-NIR TranslationIn ICASSP 2020-2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2020
-
Aim-Net: Bring Implicit Euler to Network DesignIn 2020 IEEE International Conference on Image Processing (ICIP), 2020
2019
2018
-
Image restoration via Bayesian dictionary learning with nonlocal structured beta processJournal of Visual Communication and Image Representation, 2018
-
Image Super-Resolution via RL-CSC: When Residual Learning Meets Convolutional Sparse CodingarXiv preprint arXiv:1812.11950, 2018
2017
-
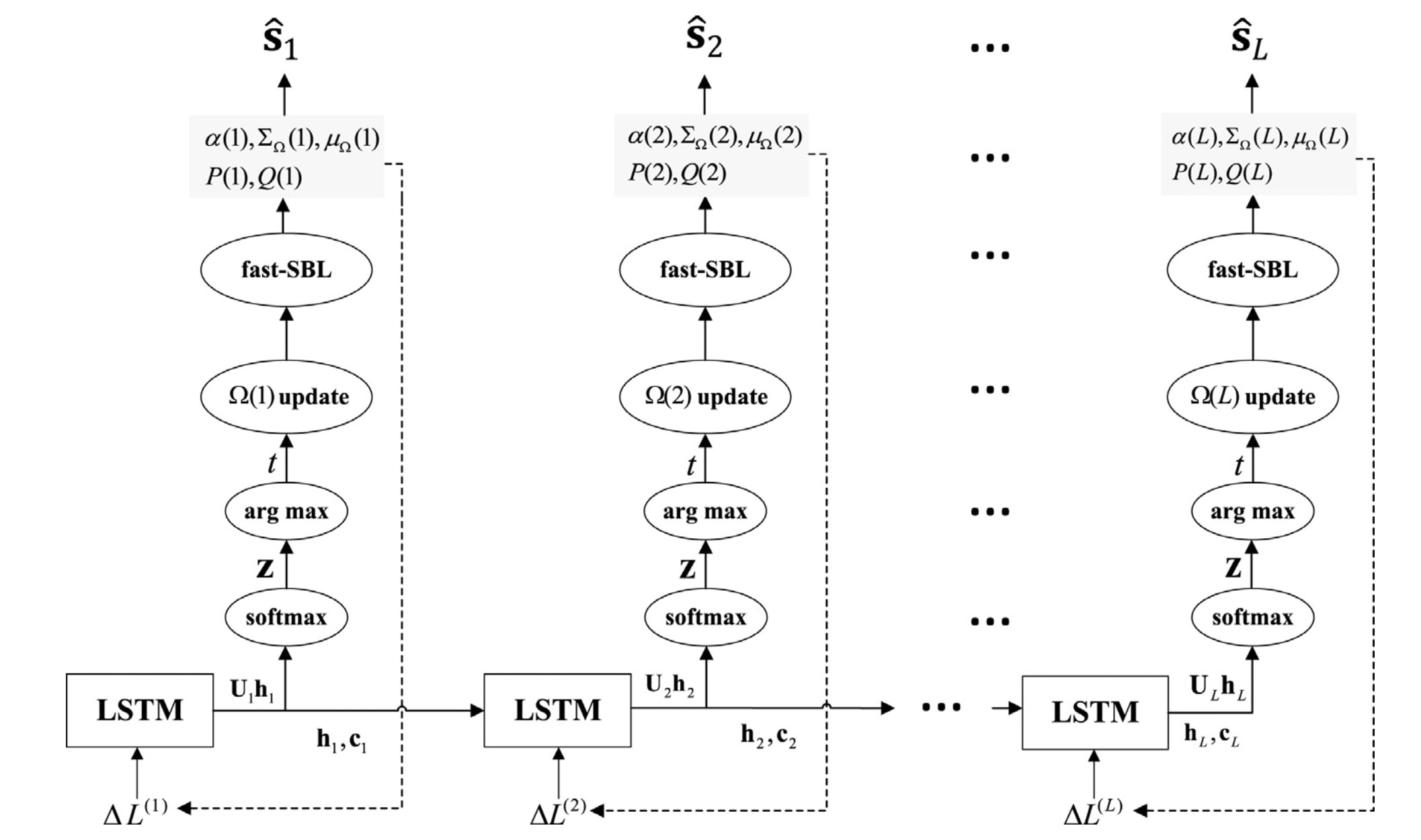
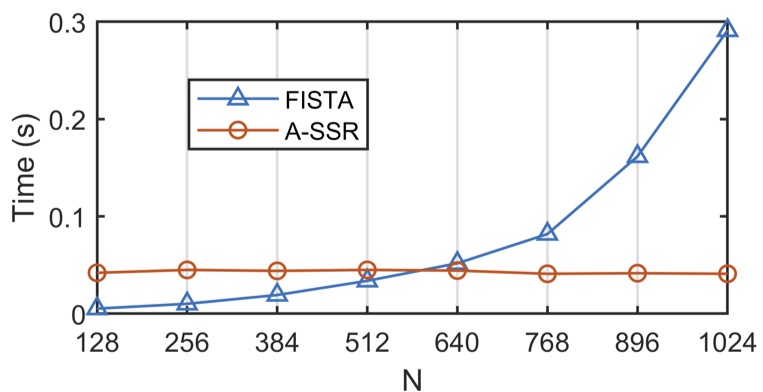
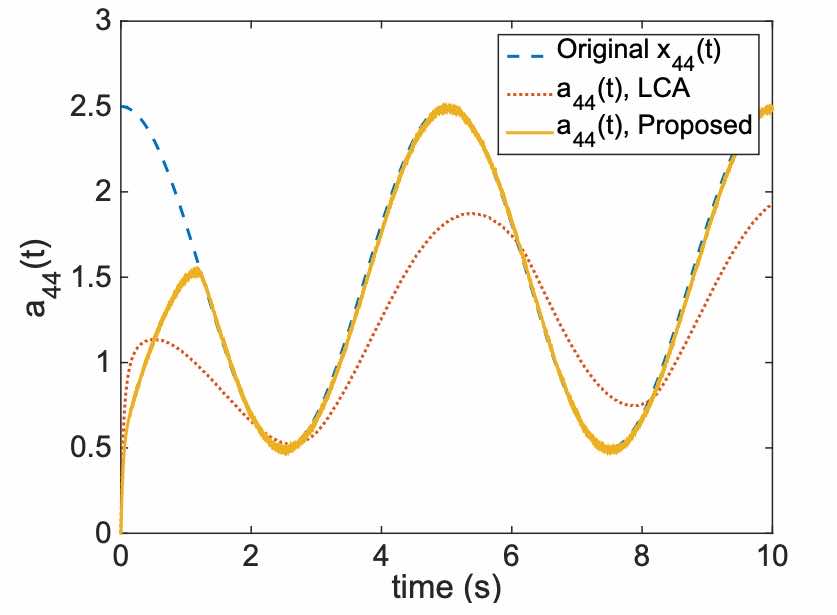 Dynamical sparse recovery with finite-time convergenceIEEE Transactions on Signal Processing, 2017🔥 TOP Journal. Recover sparse signals with analog circuits.
Dynamical sparse recovery with finite-time convergenceIEEE Transactions on Signal Processing, 2017🔥 TOP Journal. Recover sparse signals with analog circuits. -
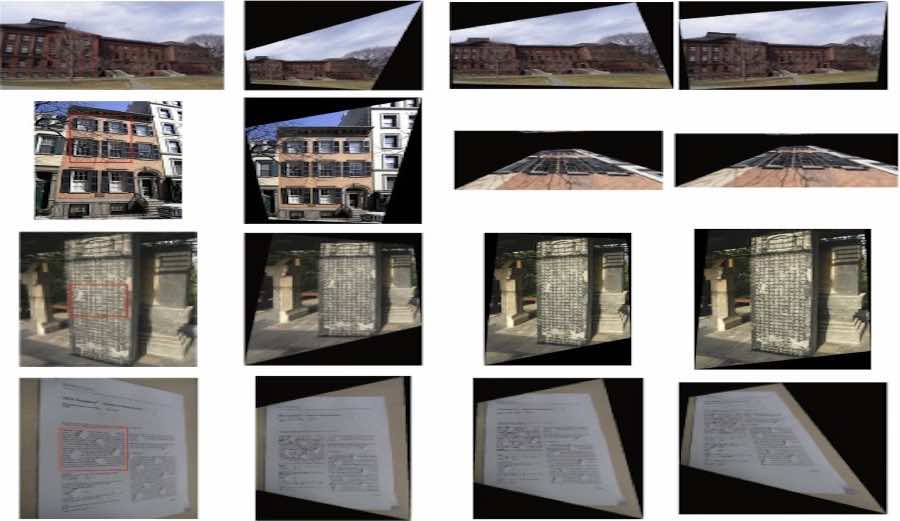 Sparse Bayesian learning for image rectification with transform invariant low-rank texturesSignal Processing, 2017
Sparse Bayesian learning for image rectification with transform invariant low-rank texturesSignal Processing, 2017
2015
2012
2010
-
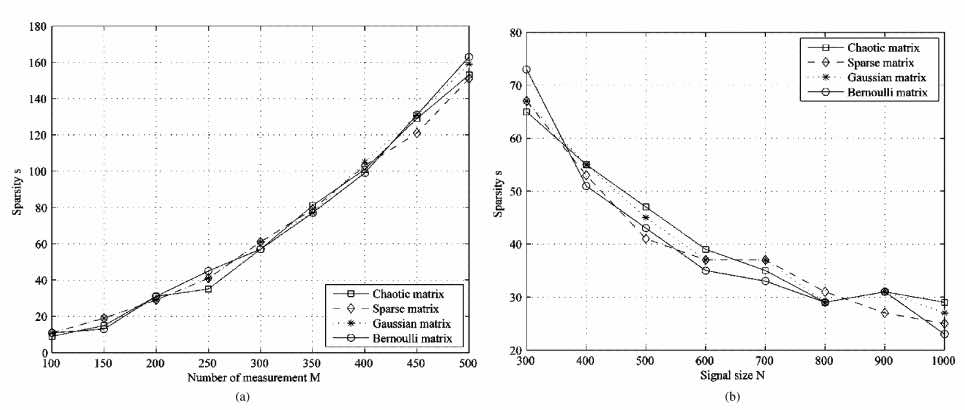 Compressive sensing with chaotic sequenceIEEE Signal Processing Letters, 2010🔥 A theoretical analysis of chaotic compressive sensing.
Compressive sensing with chaotic sequenceIEEE Signal Processing Letters, 2010🔥 A theoretical analysis of chaotic compressive sensing. -
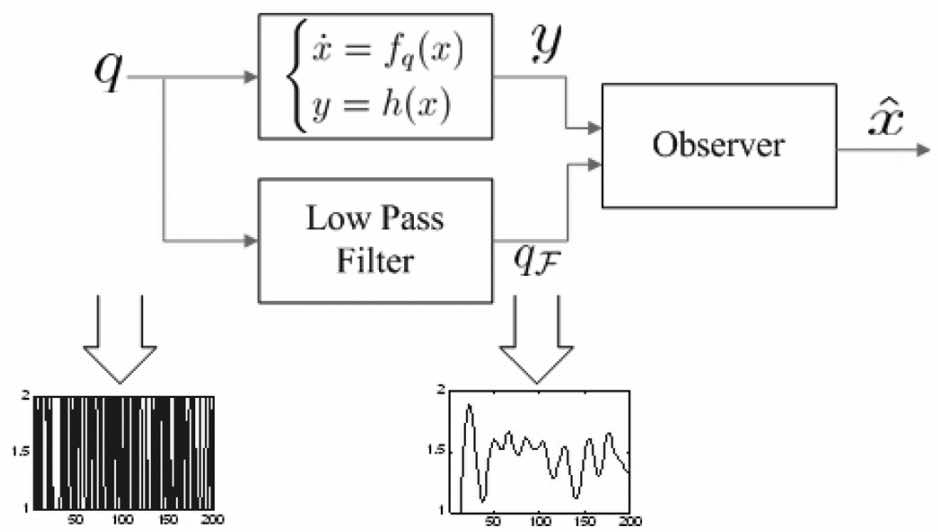 Observability forms for switched systems with zeno phenomenon or high switching frequencyIEEE Transactions on Automatic Control, 2010🔥 Top Journal
Observability forms for switched systems with zeno phenomenon or high switching frequencyIEEE Transactions on Automatic Control, 2010🔥 Top Journal
Event Camera
-
Robust motion compensation for event cameras with smooth constraintIEEE Transactions on Computational Imaging, 2020
-
Event-based high frame-rate video reconstruction with a novel cycle-event networkIn 2020 IEEE International Conference on Image Processing (ICIP), 2020
-
Robust Intensity Image Reconstruciton Based On Event CamerasIn 2020 IEEE International Conference on Image Processing (ICIP), 2020
-
Matching Neuromorphic Events and Color Images via Adversarial LearningarXiv preprint arXiv:2003.00636, 2020
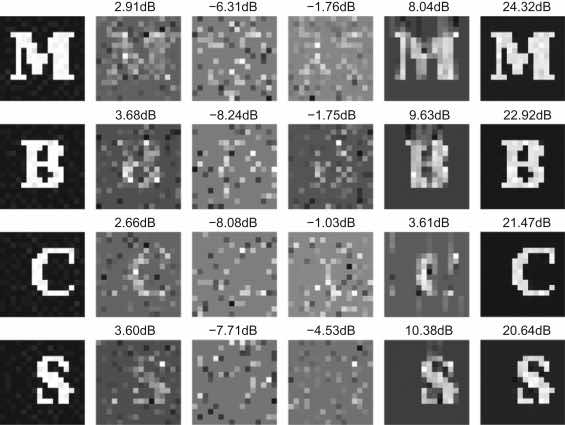
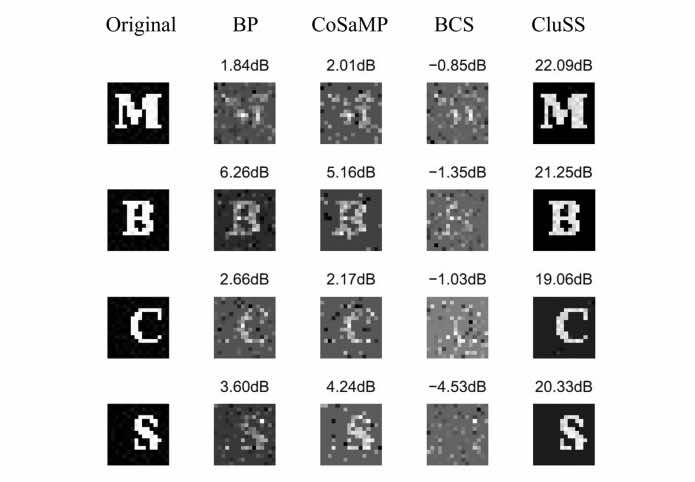
Sparse Recovery
-
-
-
-
Image Super-Resolution via RL-CSC: When Residual Learning Meets Convolutional Sparse CodingarXiv preprint arXiv:1812.11950, 2018
-
Sparse Bayesian learning for image rectification with transform invariant low-rank texturesSignal Processing, 2017
-
Dynamical sparse recovery with finite-time convergenceIEEE Transactions on Signal Processing, 2017🔥 TOP Journal. Recover sparse signals with analog circuits.
Image Processing
-
Image super-resolution by learning weighted convolutional sparse codingSignal, Image and Video Processing, 2021
-
Image restoration via Bayesian dictionary learning with nonlocal structured beta processJournal of Visual Communication and Image Representation, 2018
Others
-
-
Observability forms for switched systems with zeno phenomenon or high switching frequencyIEEE Transactions on Automatic Control, 2010🔥 Top Journal